Die Messanlage Vitronic PoliScan FM1 ist der Nachfolger der Variante M1/F1 und dient der Messung von Geschwindigkeiten von Fahrzeugen im Straßenverkehr. Diese Anlage kann auch zur Überwachung von Rotlichtverstößen eingesetzt werden.
Die Bauart wurde seitens der Physikalisch Technischen Bundesanstalt PTB über eine Baumusterprüfung im Jahr 2017 zur Eichung zugelassen.
Es handelt sich um eine rein elektronische Messanlage. Sie ermöglicht eine kontaktlose und mehrzielfähige Erfassung von Fahrzeugen im Fließverkehr. Dieser Anlagentyp kann als mobile Messanlage auf Stativ und als Festinstallation in einem Außengehäuse zum Einsatz kommen. Zulässig ist auch der quasistationäre Betrieb im absetzbaren Spezialanhänger („Enforcement Trailer“).
Das physikalische Messprinzip liegt in der Laufzeitmessung von sequentiell fächerförmig ausgesandten kurzen Lichtpulsen, die von den Fahrzeugen reflektiert werden. Über die Laufzeit der Lichtpulse und deren Abstrahlwinkel wird der Standort des Reflektors bestimmt. Die periodische Wiederholung ermöglicht der Anlage eine Objektklassifizierung und -verfolgung im Erfassungsbereich. Die Geschwindigkeit eines Objektes wird etwa 50 – 20 m vor dem Gerätestandort als Durchschnitt ermittelt.
Wird eine Überschreitung eines einstellbaren Grenzwertes festgestellt, wird ein digitales Beweisfoto erstellt. Dafür berechnet die Messanlage für das jeweilige Objekt eine technisch günstige Fotoposition voraus. Diese Soll-Position ist in der Beweisdatei gespeichert und kann über Bildauswertungen hinsichtlich der tatsächlichen Fotoposition des Fahrzeuges geprüft werden. Ergeben sich dabei keine unbegründbaren Abweichungen, erfolgte die messwertrelevante Modellbildung zum Objekt und damit die Messwertbildung korrekt.
Für eine visuelle Schnellprüfung blendet die Messanlage in das Beweisfoto einen Kontrollrahmen ein, anhand dessen die Zuordnung der dokumentierten Messung zum Fahrzeug im Rahmen eines technischen Gutachtens und eine augenscheinliche Plausibilisierung als Schnelltest erfolgen kann.
☰ Inhalt
2. Prinzip und Einsatz der Vitronic Poliscan FM1
Die Messanlage Vitronic POLISCAN FM1 ist speziell für die Überwachung der Einhaltung der zulässigen Höchstgeschwindigkeit der Verkehrsteilnehmer im Straßenverkehr konzipiert. Zudem ist kann auch die Beachtung des Rotlichts von Lichtsignalanlagen sowie von Durchfahrtsbeschränkungen überwacht werden. Die Messanlage ist für den amtlichen Einsatz, d.h. zur Eichung zugelassen und stellt damit vordergründig ein Arbeitsmittel für die hiesigen Kontrollbehörden dar. Amtliche Messungen düfen jedoch ausschließlich von entsprechend geschultem Messpersonal vorgenommen werden. Die Schulung und Qualifikation ist schriftlich nachzuweisen.
Die Messanlage kann mobil als Stativinstallation, als mobiler Fahrzeugeinbau sowie als Festinstallation in verschiedenen Außengehäusen zum Einsatz kommen. Als Besonderheit ist bei dieser Messanlage der "quasi-stationäre" Einbau / Einsatz in einem Spezialanhänger aufzuführen. Die autarke Energieversorgung des Spezialanhängers ermöglicht den Einsatz über mehrere Tage, weshalb der Aufwand vor Ort gegenüber dem Stativeinsatz ähnlich, gegenüber einer Festinstallation jedoch erheblich geringer ausfällt.
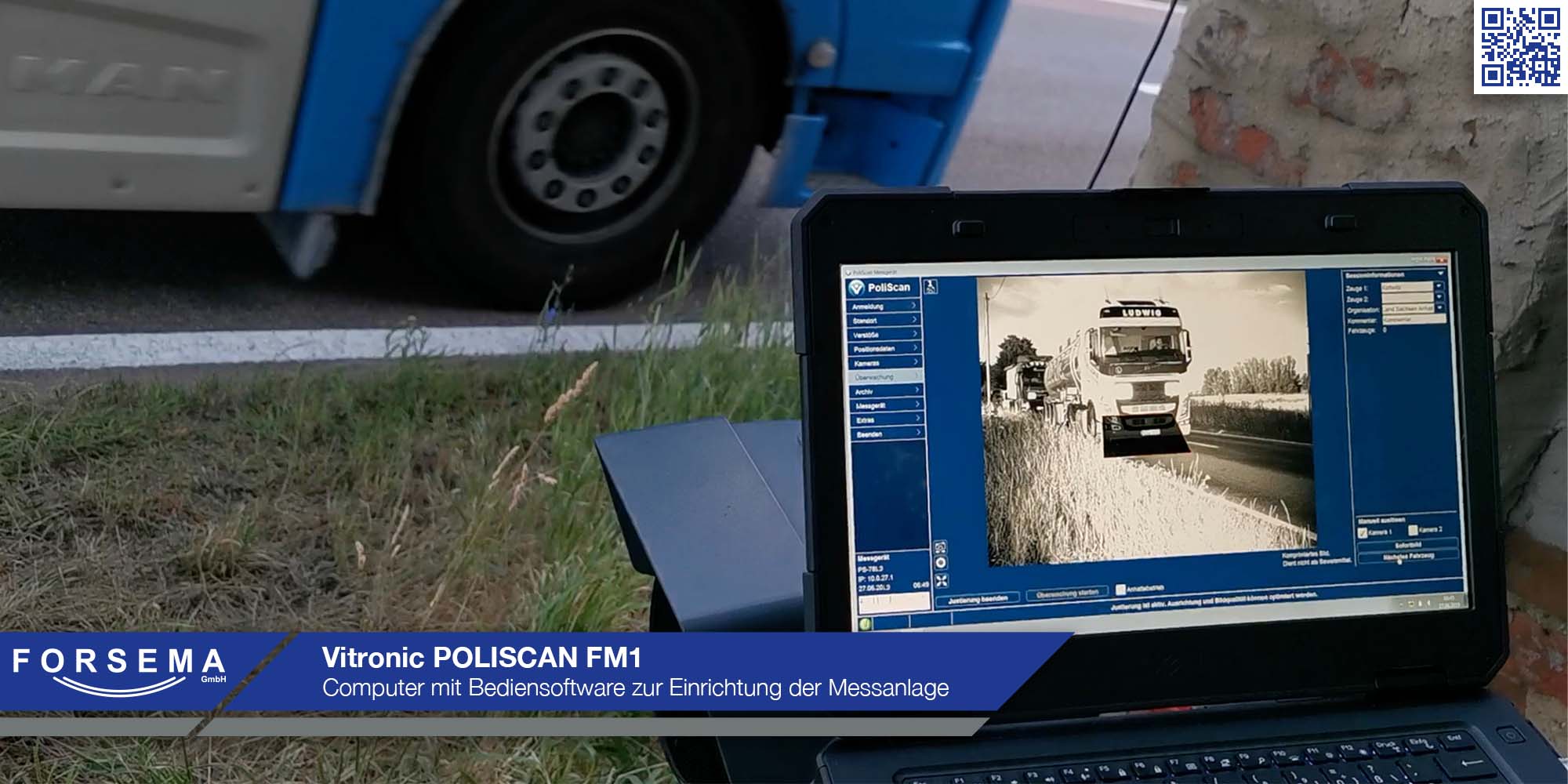
Die PoliScan FM1 – Anlage besteht im Wesentlichen aus dem Hauptmodul und einem abgesetzten Blitzgeräte. Das Hauptmodul vereint die LIDAR-Messtechnik, die Steuer- und Auswerteelektronik sowie zwei fest installierte Beweisbildkameras. Die Bedienung erfolgt über einen externen Bediencomputer. Für amtliche Messungen im abfließenden Verkehr (Heckmessungen) kann eine abgesetzte Kamera zur Identifizierung der Fahrzeugführer aufgestellt werden.
Die nachfolgenden Lichtbilder zeigen die allgemeine Einsatzweise und die wesentlichen Komponenten der Messanlage in den verschiedenen Aufstellmöglichkeiten.
Die FM1 ist allgemein dem Anlagenbautyp "LIDAR-Scanner" zuzuordnen. Der Begriff „LIDAR“ ist eine englische Abkürzung und steht für „light detection and ranging“. Umgangssprachlich beinhaltet dieser Begriff, dass Objekte über eine Laserlicht-Messung erfasst und in der Position und Bewegungsrichtung vermessen werden.
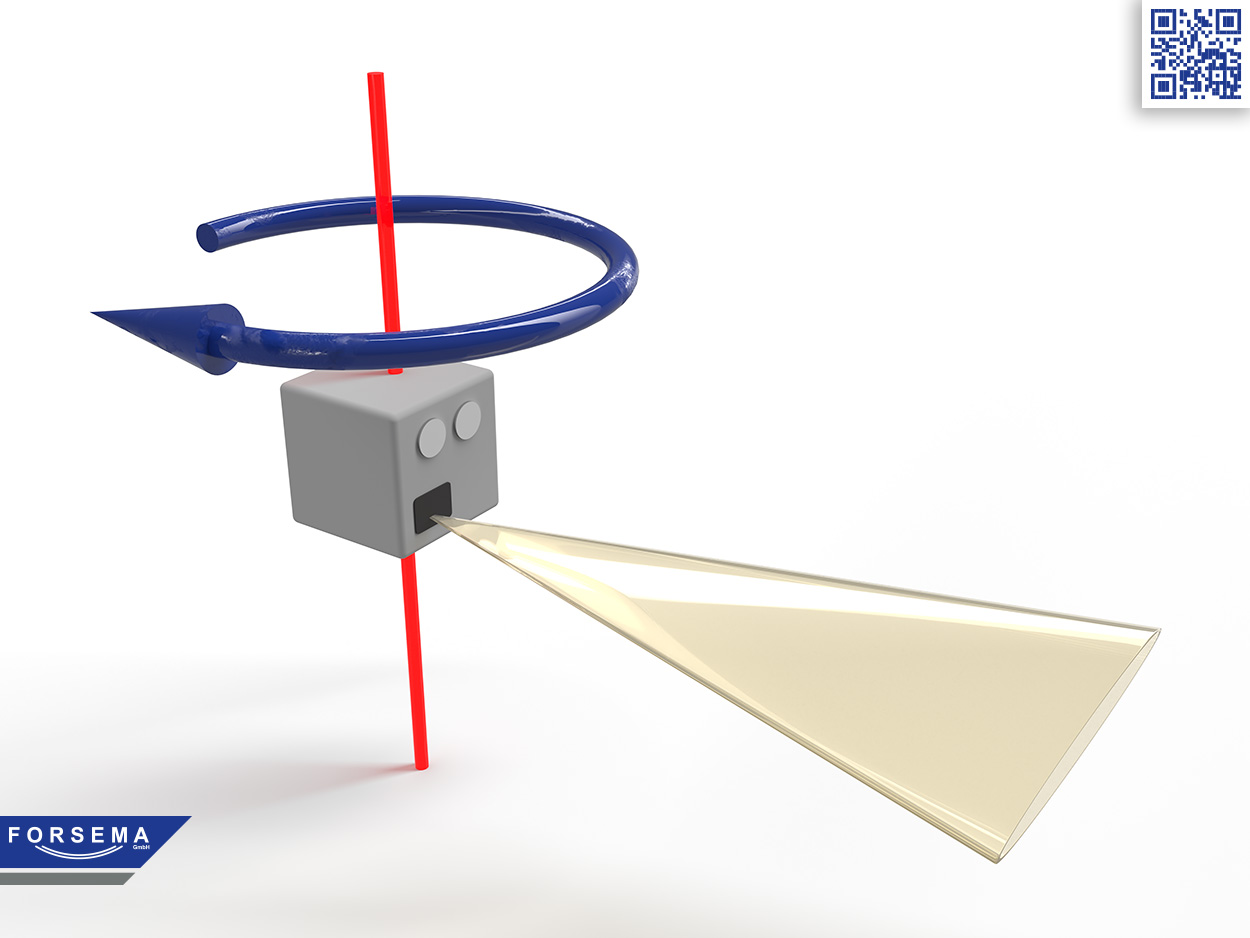
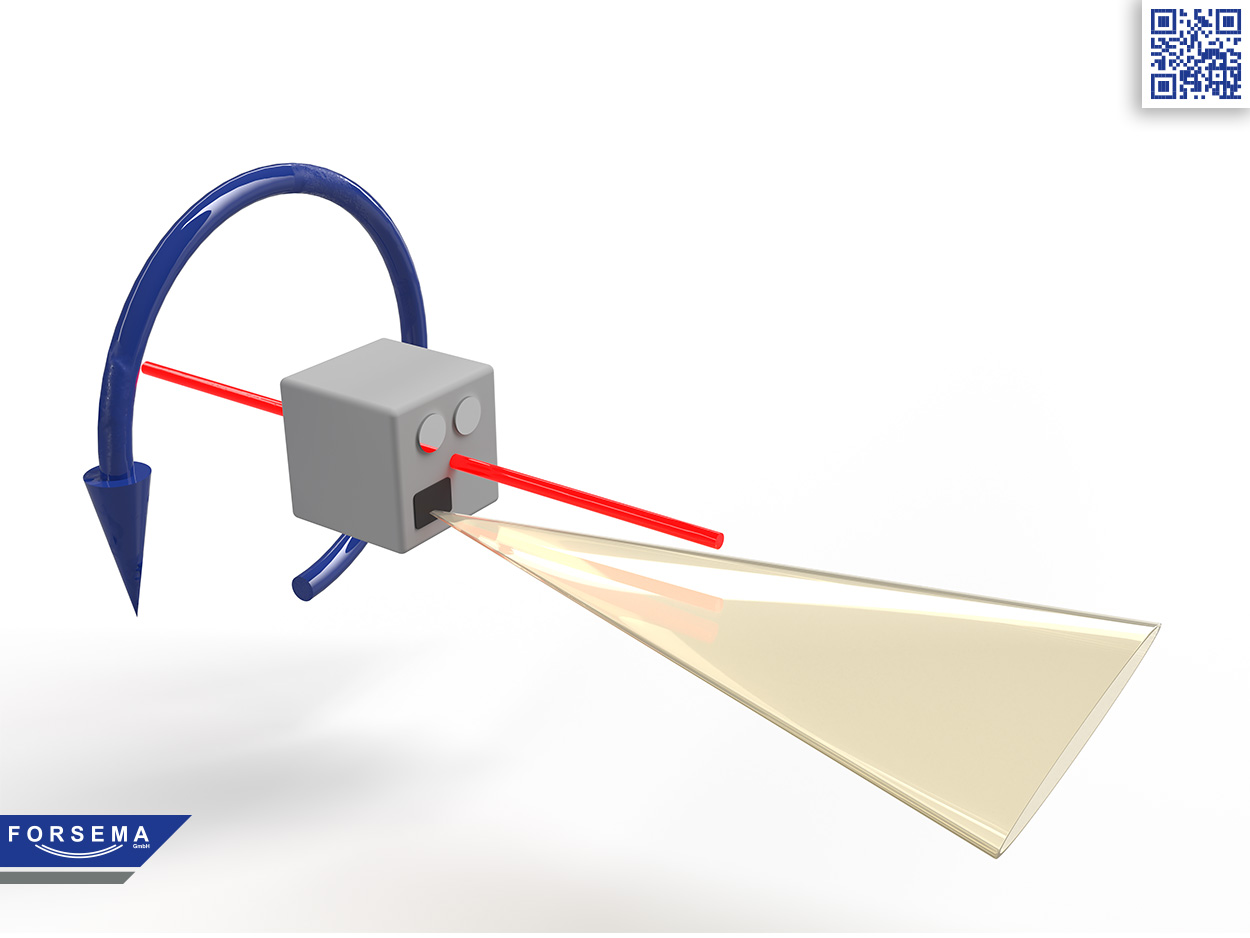
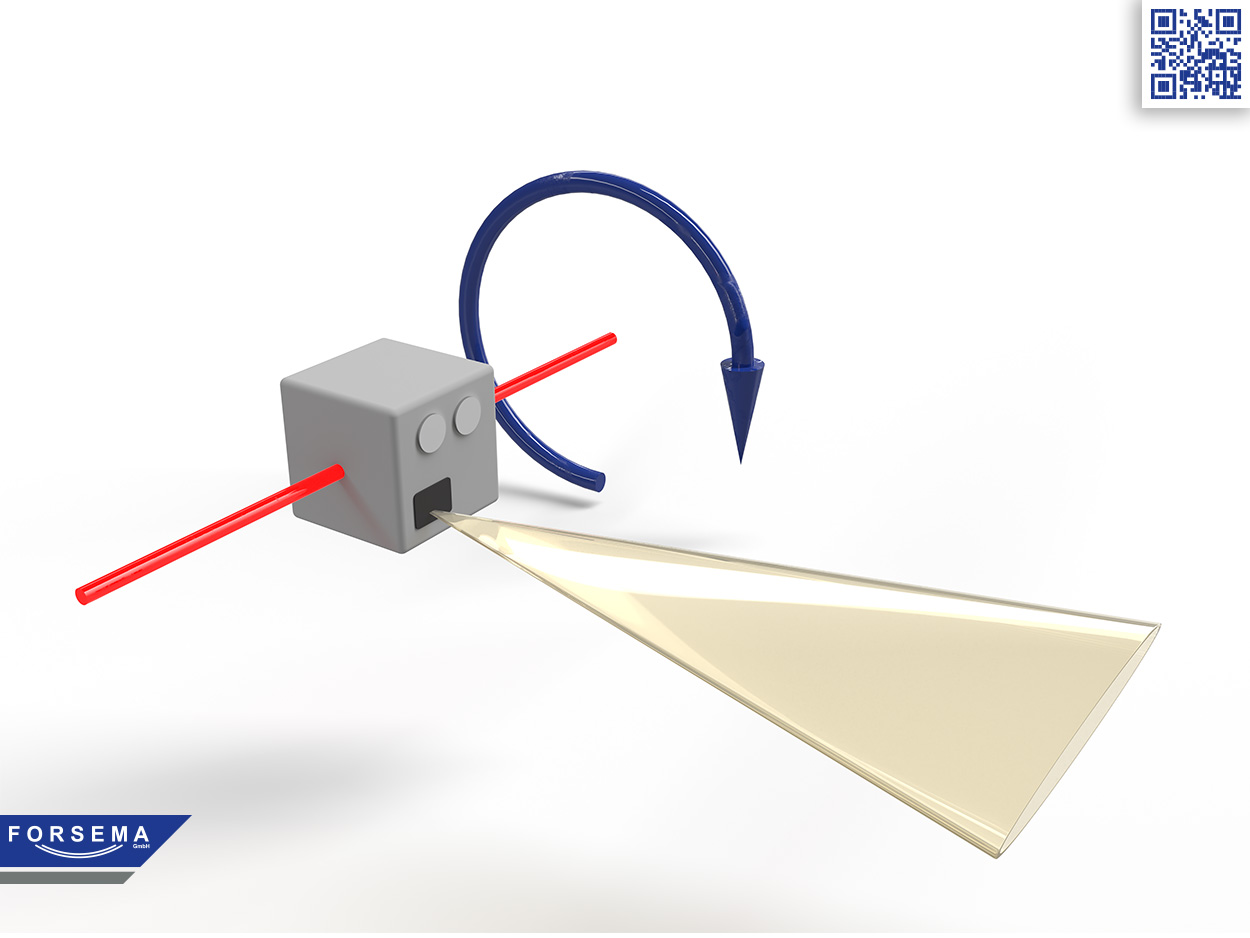
Die für das menschliche Auge unsichtbaren Lichtpulse werden dabei horizontal schwenkend über einen Winkel von 45° mit einer Schrittweite von 0.28° ausgesandt, sodass ein Messfächer über der Fahrbahn entsteht. Dieses Schwenken über einen Richtungswinkelbereich erfolgt periodisch 100-mal je Sekunde und führt zur Bezeichnung der Anlage als „Scanner“.
Die von der Messanlage ausgesandten Lichtpulse werden von den Umgebungsobjekten und Fahrzeugen reflektiert. Über die Erfassung der Laufzeit der Lichtimpulse kann der Abstand des jeweiligen Reflektors gemessen bzw. berechnet werden. Anhand der Messpunkte, die einem Fahrzeug zuzuordnen sind, wird eine durchschnittliche Geschwindigkeit und die Fahrtrichtung bestimmt.
Im Falle einer Grenzwertüberschreitung wird das gemessenen Fahrzeug über ein digitales Beweisfoto registriert. Das Bild und weitere Messdaten werden als Falldatei abgespeichert.
Abbildung 2
☰ Inhalt
3. Aufstellung und Ausrichtung der Messanlage
Der Hersteller und die Zulassungsbehörde versichern zwar, dass eine fehlerhafte Aufstellung und Ausrichtung nicht zu fehlerhaften Messbeträgen führen soll. Dennoch gibt die Gebrauchsanweisung Grenzen für den amtlichen Einsatz vor. Auch aus dem technischen Messprinzip erwachsen Rahmenbedingungen für die Positionierung, Ausrichtung und Einrichtung der Messanlage.
Die Messanlage ist zunächst seitlich der Fahrbahn aufzustellen. Dabei kann die Messanlage sowohl links als auch rechts der Fahrbahn positioniert werden. Es sind Messungen im auflaufenden und abfließenden Fahrzeugverkehr zulässig.
Der Fahrbahnabschnitt, in dem Messungen vorgenommen werden sollen, darf keine Kurvenradien von weniger als 100 m aufweisen. Fahrbahnabschnitte mit Topographien, die eine ununterbrochene Erfassung der Fahrzeuge verhindern, sind ungeeignet. Es können bis zu 4 Fahrstreifen überwacht werden.
Ausgehend von den beschränkenden Verkehrszeichen ist bei einer technisch maximalen Erfassungsweite von 75 m ein technisch sachgerechter und juristisch begründbarer Abstand für den Gerätestandort zu wählen. Der Messerfassungsbereich zwischen 50 m und 20 m vor dem Gerät soll sich innerhalb der Beschränkungszone oder des Gefährdungsabschnittes (zB. Kreuzungsbereich) befinden. Der Bereich der Messerfassung sollte auch soweit nach den Verkehrszeichen liegen, dass die im Regelfall vorzunehmenden Abbremsungen der Fahrzeuge abgeschlossen sind und damit nicht überwiegend bremsende Fahrzeuge erfasst werden.
Der vom Messgerät ausgesandte LIDAR-Fächer ist vom gewählten Standort aus auf die Fahrzeuge innerhalb des zu überwachenden Fahrbahnabschnittes auszurichten. Dabei sollen die Fahrzeuge möglichst bis zu einem Abstandsradius von 75 m zum Messgerät erfasst werden können.
Da praktische Versuche gezeigt haben, dass für gültige und technisch nachvollziehbare Messungen die amtliche Kennzeichentafel der Fahrzeuge vom LIDAR erfasst werden sollte, ist diese Einstellarbeit für den Messdurchsatz einerseits sowie auch für die messtechnische Korrektheit andererseits von wesentlicher Bedeutung.
Die Ausrichtung der Anlage bezüglich des Schwenkwinkels ist nach Tabellen der Bedienungsanweisung als Empfehlung vorgegeben. Der Schwenkwinkel orientiert sich primär am Querabstand der Messanlage zu den überwachten Fahrstreifen. Die Gebrauchsanweisung führt einen Bereich zwischen 14° und 25° auf.
Signifikante Rollwinkel zur Fahrbahnebene sind über eine Anpassung per Wasserwaage zu vermeiden.
Der zur Erfassung der Fahrzeugfronten erforderliche Neigungswinkel ergibt sich aus der Aufstellhöhe zur Fahrbahn sowie der Topographie der Fahrbahn. Leichte Neigungswinkel sind daher zulässig. Jedoch ist eine Messung aus einer erhöhten Position mit signifikanten Neigungswinkeln aufgrund resultierender Messabweichungen von wahren Wert abzulehnen.
Abbildung 6: Video einer typischen Versuchsfahrt
Die Höhe der Unterkante der Messplattform über der Fahrbahn, der Querabstand sowie die Fahrstreifenbreiten werden vom Geräterechner als Eingabeparameter übernommen und sind vorab bis auf eine Genauigkeit von 10 cm auszumessen. Der Querabstand der Anlage kann auch automatisch anhand des Fahrzeugverkehrs bestimmt werden.
Der Schwenkwinkel ist für die messtechnische Korrektheit der Messungen relevant. Dieser kann zwar manuell abgeschätzt werden, sollte aber im amtlichen Bereich aus hiesiger Sicht grundlegend im Rahmen der Anlageneinrichtung automatisch anhand des Fahrzeugverkehrs ermittelt werden.
Im amtlichen Messbetrieb sind die folgenden Punkte zusätzlich zu beachten:
Die Aufstellposition neben der Fahrbahn darf sich während des Messbetriebes in Höhe und Abstand nicht verändern. Bei bewussten Eingriffen ist der Messbetrieb zu beenden und eine neue Messreihe zu starten. Die Änderung ist mit dem Zeitpunkt zu protokollieren.
Im Stativbetrieb ist darüber hinaus auf eine ausreichende Standsicherheit am Aufstellort zu achten, damit eine unbeabsichtigte Ausrichtungsänderung, beispielsweise durch ein mögliches Einsinken der Aufstelleinrichtung, vermieden wird.
Hindernisse im LIDAR-Bereich zwischen Messanlage und Fahrzeug führen zu Messunterbrechungen und sind zu vermeiden.
Die Ausrichtung der Messanlage hat auf der Basis des derzeit bekannten Messprinzips zwar kaum Einfluss auf die Korrektheit der Geschwindigkeitsmessung. Jedoch kann über eine unkorrekte Ausrichtung die Zuordnungssicherheit zwischen dem Messobjekt und dem Messwert herabgesetzt werden, da die Einrichtung direkte Auswirkungen auf die Positionierung des Kontrollrahmens entfaltet.
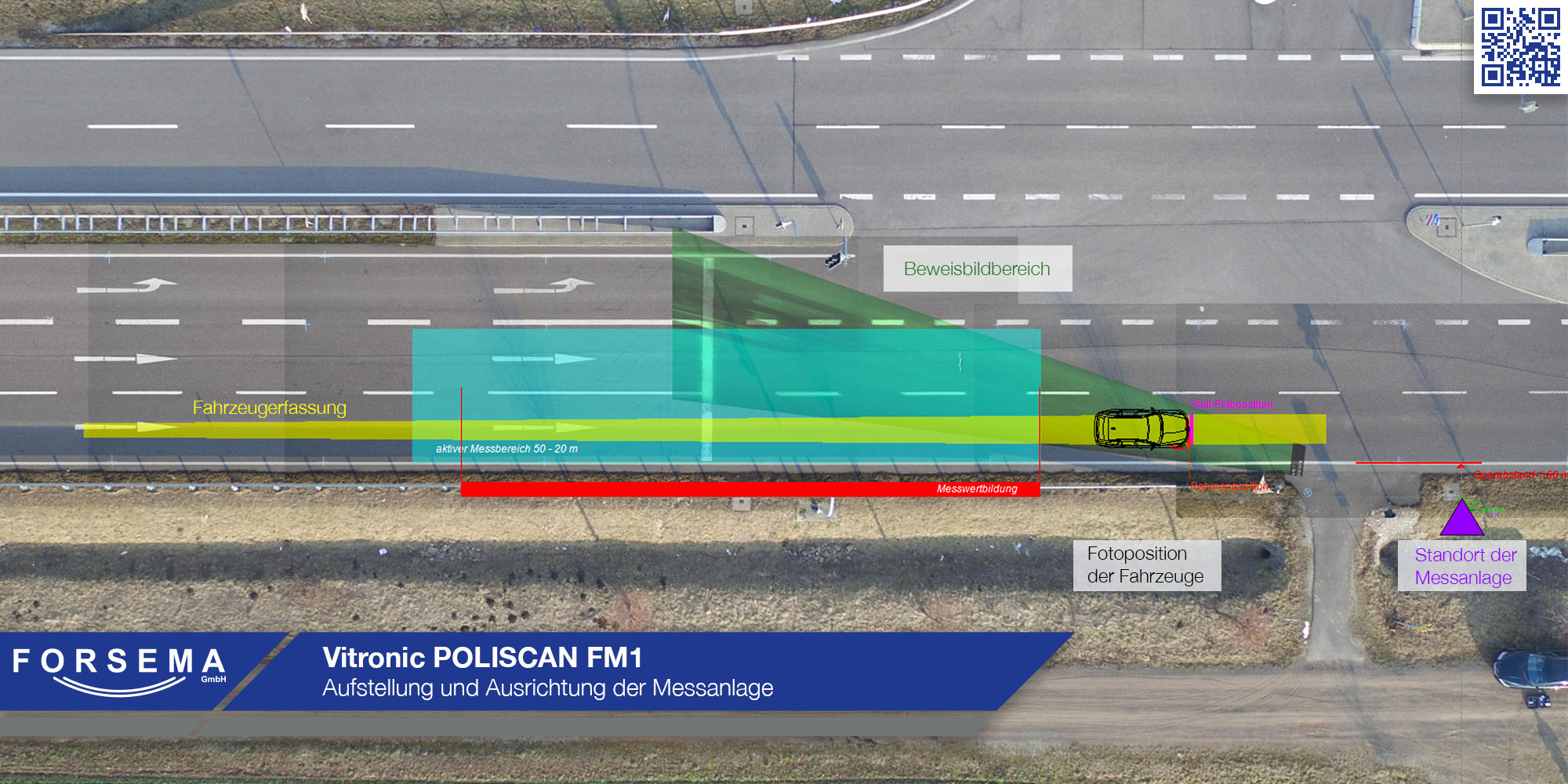
Die nachfolgende Abbildung zeigt eine technisch sachgerechte Aufstellung und Ausrichtung der Messanlage im Praxisfall. Die Erfassung von Fahrzeugen beginnt räumlich noch deutlich vor dem Bereich der Messwerterfassung (türkis) und reicht bis auf eine Annäherung auf etwa 10 m. Dieser Erfassungskanal ist in den Falldateien gespeichert und in der Abildung mittels eines gelben Pfades visualisiert. Die Messwertbildung erfolgt dann auch im formal festgelegten Bereich zwischen 50 m und 20 m in Fahrtrichtung vor dem Gerät (türkiser Bereich) mit allenfalls geringen Einschränkungen. In der Abbildung ist der Abschnitt der Messwertbildung rot markiert. Diese Daten sind ab der Softwareversion 4.4.9 auf Verlangen der Konformitätsbewertungsstelle PTB nicht mehr verfügbar und sind in den Falldateien statisch auf den formalen Bereich festgelegt. Wurden die Empfehlungen / Vorgaben der Gebrauchsanweisung zum Schwenkwinkel beachtet, ergibt sich in der Regel eine Fotoposition in Fahrtrichtung nach dem Bereich der Messwertgewinnung, etwa mittig des Abbildungsbereiches einer der beiden Systemkameras. Dieser Abbildungsbereich ist in der Grafik grün hinterlegt. Die Front des gemessenen Fahrzeuges wird dabei an der Sollfotoposition abgelichtet, die aus den Scandaten / Messmodelldaten vorausberechnet wurde. Auch der rein rechnerisch in das Beweisbild eingeblendete Kontrollrahmen bildet sich bei einer sachgerechten Ein- und Ausrichtung an der Front des gemessenen Fahrzeuges ab.
Abbildung 7
☰ Inhalt
4. Technisches Messprinzip der Vitronic PoliScan Speed M1
Die Messanlage Vitronic POLISCAN FM1 ist ein Messanlage für die amtliche Überwachung des Fahrzeugverkehrs hinsichtlich der Einhaltung der zulässigen Höchstgeschwindigkeit.
Die Primärmessung beinhaltet eine Entfernungsbestimmung. Dafür sendet die Messanlage kurze Lichtpulse mit einer zeitlichen Länge von wenigen Nanosekunden aus. Trifft ein solcher "Lichtblitz" auf eine Fahrzeugfront kommt es zu einer diffusen Reflexion. Je nach Struktur werden Teile des Lichtes zurück zum Messgerät reflektiert.
Die Messanlage stoppt die Zeit zwischen dem Aussenden des Lichtpulses und dem Empfang der Reflexion. Über die Lichtgeschwindigkeit wird die Entfernung des Reflektors berechnet.
Die Position des Reflektors wird bestimmt, indem die Messanlage zeitgleich die Richtung der Primärmessung berücksichtigt. Damit ist der Ort des Reflektors als Koordinate dem System bekannt.
Diese Primärmessung wird in einem Winkelsektor von 45° sequentiell 158 mal wiederholt. Die Winkelauflösung beträgt 0,28°.
Über diese schwenkende Primärmessung erfasst die Anlage quasi den Sichthorizont. Dieser Scan wird 100 mal je Sekunde durchgeführt. Damit erfasst die Messanlage die zeitliche Veränderung des Sichthorizontes fortlaufend.
Die Messanlage bildet aus dem Sichthorizont Gruppen bzw. Objekte. Diese Objekte werden in einer Liste gespeichert.
Mit dem zeitlich nachfolgend erfassten Sichthorizont (Scan) erfolgt die identische Auswertung. Ergänzt wird hier, dass geprüft wird, welche der Datenpunkte und Gruppen einem bereits gelisteten Objekt zugeordnet werden können. Hierfür kommen verschiedene Kontrollen und Vorhersagemodelle zum Einsatz. Auf diese soll hier zur Übersicht nicht weiter eingegangen werden.
Jedes gelistete Objekt wird mit jedem Scan mit weiteren Datenpunkten ergänzt. Aus diesem Datenbestand aus Ort und Zeit wird die Geschwindigkeit und die Bewegungsrichtung berechnet. Für den nächsten Scan steht dann für jedes Objekt eine Erwartungsposition zur Verfügung. Anhand dieser wird die Zuordnung der Daten präzisiert. Je länger das Objekt von der Messanlage erfasst, verfolgt oder beobachtet wird, desto präziser wird das messtechnische Modell und damit die konkrete Messung.
Die Ersterfassung erfolgt im LIDAR-Bereich bis 75 m Abstand zur Messanlage. Die Messwertbildung erfolgt innerhalb eines Bereiches von 50 – 20 m vor der Messanlage. Der Quererfassungsbereich wird über die eingetragenen Fahrstreifenbreiten sowie den Querabstand der Messanlage zur Fahrbahn bestimmt.
Bewegt sich ein Objekt zu schnell, soll ein Beweisfoto gefertigt werden. Dafür ist die Messanlage mit zwei Kameras ausgerüstet. Diese sind zu einander parallel und mittig des Abtastsektors ausgerichtet. Die Ausrichtung der Kameras ist bekannt und unveränderlich.
Anhand der virtuellen Fahrzeugmessmodelle wird einen Fototermin berechnet und eine der beiden Kameras ausgewählt.
☰ Inhalt
5. Beweisbilder / Falldatei
Zur behördlichen Verfolgung im Rahmen einer Ordnungswidrigkeit ist das Fahrzeug sowie der / die Fahrzeugführer(in) festzustellen. Zu diesem Zweck fertigt die Messanlage Beweisbilder.
Im Beweisfoto wird derart ausgelöst, dass die Front des erfassten Objektes möglichst mittig im Bild dokumentiert wird.
Da die Messanlage über zwei digitale Kameras mit mechanisch fixierter Ausrichtung verfügt, entscheidet die Messanlage anhand der modellbasierten vorbestimmten Fotoposition über den Einsatz der einen oder anderen Kamera. Aufgrund der fixen Kameraausrichtung und der bekannten Ausrichtung der Gesamtanlage ist es möglich, diese avisierte Fotoposition in dem perspektivischen Beweisfoto zu markieren. Die erwartete Fotoposition des jeweiligen Messobjektes wird mittels eines eingeblendeten Kontrollrahmens im Bild gekennzeichnet. Gemäß der Gebrauchsanweisung handelt es sich bei diesem Viereck um ein perspektiv-richtig in das Foto eingeblendetes Rechteck im Bereich der jeweiligen Fahrzeugfront. Dessen Breite soll der Breite des mathematischen Modells des erfassten Fahrzeugs entsprechen.
Die Einblendung eines Kontrollrahmens in eine perspektivische Bilddarstellung ist dabei nicht trivial. Die Problematik besteht darin, dass die Messanlage lediglich eine zweidimensionale Flächenansicht der Fahrzeugbewegungen erfasst. Die Positionierung eines Kontrollrahmens an der Front eines Fahrzeuges ist jedoch ein dreidimensionaler Vorgang in einem zweidimensionalen Bild.
Faktisch wird nach Angaben des Herstellers die vom Messpersonal gemessene und einzugebende Höhenlage verarbeitet, um unter Ansatz einer sachgerechten flächenparallelen Ausrichtung des LIDAR den Kontrollrahmen korrekt darzustellen. Dabei wird allerdings der Rahmen zur besseren Visualisierung um 15-20% in den Boden geschoben.
Zusätzlich wird ein „Skalenstrich“ in das Foto eingeblendet. Dieser Strich soll ebenfalls in der Fotoperspektive korrekt mit einer realen Länge von 50 cm an der Fahrzeugfront eingeblendet sein. Über einen visuellen Vergleich mit der Breite der Kennzeichentafel des Fahrzeuges soll eine überschlägige Kontrolle der konkreten Messung möglich sein. Zudem markiert dieser die mittlere Ebene des LIDAR in der Vertikalen.
Abbildung 8
Das im Einzelfall gefertigte Beweisbild wird zusammen mit weiteren Daten zur Messung und Messdaten in einer Binärdatei gespeichert. Es werden die folgenden Zusatzdaten gespeichert:
Datum und Uhrzeit
Softwareversion
Fahrzeugtyp
Fartrichtung und Geschwindigkeit
Grenzwert und Fotogrenzwert
Spur
Ort
Organisation und Zeugen
Beginn / Ende Eichgültigkeit
Breite der Fahrstreifen
Querabstand
Höhenlage
Schwenkwinkel und Nickwinkel
Links/RechtsMessung
Kamera mit Objektiv und Typ
Messbereich und (eingeschränkte) Messrohdaten
Diese Datei ist digital signiert und verschlüsselt, um deren Authentizität und Integrität unabhängig von der Anzahl der Übertragungs- und Kopiervorgänge zu sichern.
Die Integrität einer Datei bedeutet, dass der Dateiinhalt nach der Erstellung der Datei nicht mehr verändert worden ist. Dafür erstellt die Messanlage nach der Zusammenstellung der Dateiinhalte einen sogenannten Fingerabdruck. Das ist eine Zahlenreihe die sich auch bei einer nochso kleinen und ggf. unbedeutenden Änderung vollständig ändert. Der Algorithmus (Hash-Funktion SHA) ist so konnzipiert, dass quasi grundsätzlich keine weitere Dateizusammenstellung mit dem selben Fingerabdruck (Hash-Wert) existiert.
Dieser Fingerabdruck wird der Datei angehangen und muss ebenfalls gegen Veränderungen geschützt werden. Dafür kommt ein asymmetrisches Verschlüsselungsverfahren (RSA 1024 / RSA 2048) zur Anwendung. Die Verschlüsselung erfolgt dabei mit einem geheimen internen Schlüssel der Messanlage. Die Entschlüsselung zur Prüfung des Fingerabdruckes erfolgt mit einem dazugehörigen öffentlichen Schlüssel, der in einer separaten Token-Datei bei den Eichämtern und Bußgeldstellen verfügbar ist. Der geheime private Schlüssel in der Messanlage sowie der öffentliche Schlüssel bilden ein Schlüsselpaar, dass nur für eine konkrete Messanlage ausgestellt wird. Diese konkrete Zuordnung ermöglicht die Feststellung der Authentizität, d.h. die Zuordnung der Herkunft der Falldatei zur Messanlage.
Zusätzlich ist die gesamte Datei mit dem Verfahren AES verschlüsselt. Damit ist insgesamt gewährleistet, dass ausschließlich ein berechtigter Personenkreis Zugang zum Dateiinhalt erlangt. Der Hersteller der Messanlage hat dafür ein Bildbetrachtungsprogramm erstellt. Mit dem "TUFF-viewer" mit Besitz der zur Messanlage gehörenden Token-Datei die Datei geöffnet und in andere Formate exportiert werden. Bevor der Dateiinhalt verarbeitet werden kann, wird die digitale Signatur geprüft.
☰ Inhalt
6. Verwertungskriterien für die amtliche Nachbearbeitung
Die Zuordnung wird augenscheinlich durch eine Kontrolle des Beweisfotos ohne weitere Prüfung der tatsächlichen Voraussetzungen bei den Bußgeldstellen wie folgt vorgenommen:
Im Kontrollrahmen dürfen keine Teile eines weiteren Fahrzeugs abgebildet sein.
Die Unterkante des Rahmens muss unterhalb eines Vorder- bzw. Hinterrades bei einer Front- bzw. Heckmessung abgebildet sein.
Im Rahmen muss entweder ein Rad abgebildet sein oder das amtliche Kennzeichen bzw. Teile davon. Er kann auch beides enthalten.
Unter diesen Bedingungen soll die Messung einem Fahrzeug eindeutig zuzuordnen sein. Voraussetzung für diese vereinfachte Auswertung ist eine Aufstellung und Bedienung nach der gültigen Gebrauchsanweisung.
☰ Inhalt
7. Zulassung und Konformitätsbewertung
Die Messanlage der Firma Vitronic von Typ PoliScan Speed dient der Messung von Geschwindigkeiten von Fahrzeugen im Straßenverkehr und verfügt dafür über eine innerstaatliche Bauartzulassung der Physikalisch Technischen Bundesanstalt PTB in Braunschweig unter dem Zulassungszeichen 18.11 / 10.02 (M1 HP) bzw. 18.11-06.01 (M1).
☰ Inhalt
8. Eichung und Verkehrsfehlergrenzen
Für amtliche Messungen ist eine gültige Eichung die Voraussetzung. Eine gültige Eichung beinhaltet, dass nach einem zugelassenen Eichverfahren eine korrekt funktionierende Messanlage festgestellt wurde und alle danach erneuerten Sicherungsaufkleber an der gegenständlichen Messanlage unversehrt und vorhanden sind. Die Eichgültigkeit beträgt 1 Jahr und endet mit Ablauf des dem Jahr der Eichung folgenden Jahres.
Gemäß Eichung hat die Messanlage den Eichanforderungen EA 18.11 zu entsprechen. Somit betragen die Verkehrsfehlergrenzen nach der Eichordnung im Messbetrieb bei Geschwindigkeiten bis 100 km/h ±3 km/h und bei darüber liegenden Messwerten ±3 % vom Geschwindigkeitsmesswert.